Robust 6DoF Pose Estimation Against Depth Noise and a Comprehensive Evaluation on a Mobile Dataset
Abstract
Robust 6DoF pose estimation with mobile devices is the foundation for applications in robotics, augmented reality, and digital twin localization. In this paper, we extensively investigate the robustness of existing RGBD-based 6DoF pose estimation methods against varying levels of depth sensor noise. We highlight that existing 6DoF pose estimation methods suffer significant performance discrepancies due to depth measurement inaccuracies. In response to the robustness issue, we present a simple and effective transformer-based 6DoF pose estimation approach called DTTDNet, featuring a novel geometric feature filtering module and a Chamfer distance loss for training. Moreover, we advance the field of robust 6DoF pose estimation and introduce a new dataset – Digital Twin Tracking Dataset Mobile (DTTDMobile), tailored for digital twin object tracking with noisy depth data from the mobile RGBD sensor suite of the Apple iPhone 14 Pro. Extensive experiments demonstrate that DTTDNet significantly outperforms state-of-the-art methods at least 4.32, up to 60.74 points in ADD metrics on the DTTD-Mobile. More importantly, our approach exhibits superior robustness to varying levels of measurement noise, setting a new benchmark for the robustness to noise measurements.
DTTD-Mobile Dataset
We introduce DTTD-Mobile as a novel digital-twin pose estimation dataset captured with mobile devices. We provide in-depth LiDAR depth analysis and evaluation metrics to illustrate the unique properties and complexities of mobile LiDAR data.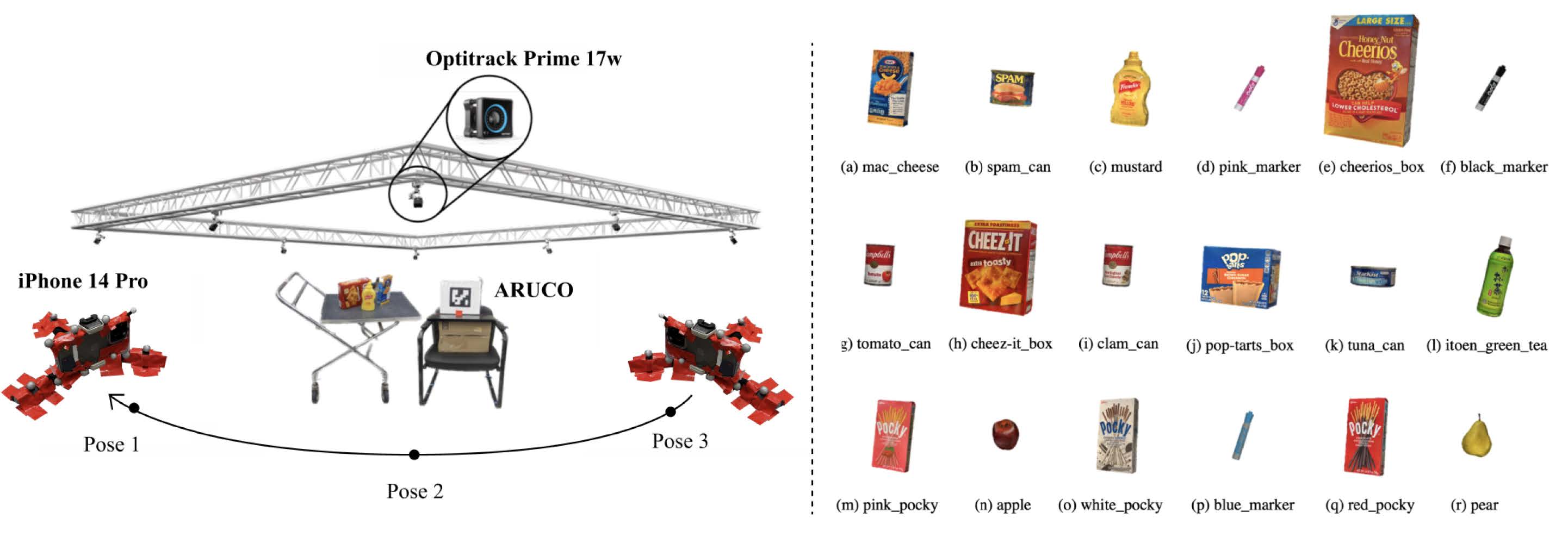
Left: Setup of our data acquisition pipeline. Right: 3D models of the 18 objects in DTTD-Mobile.
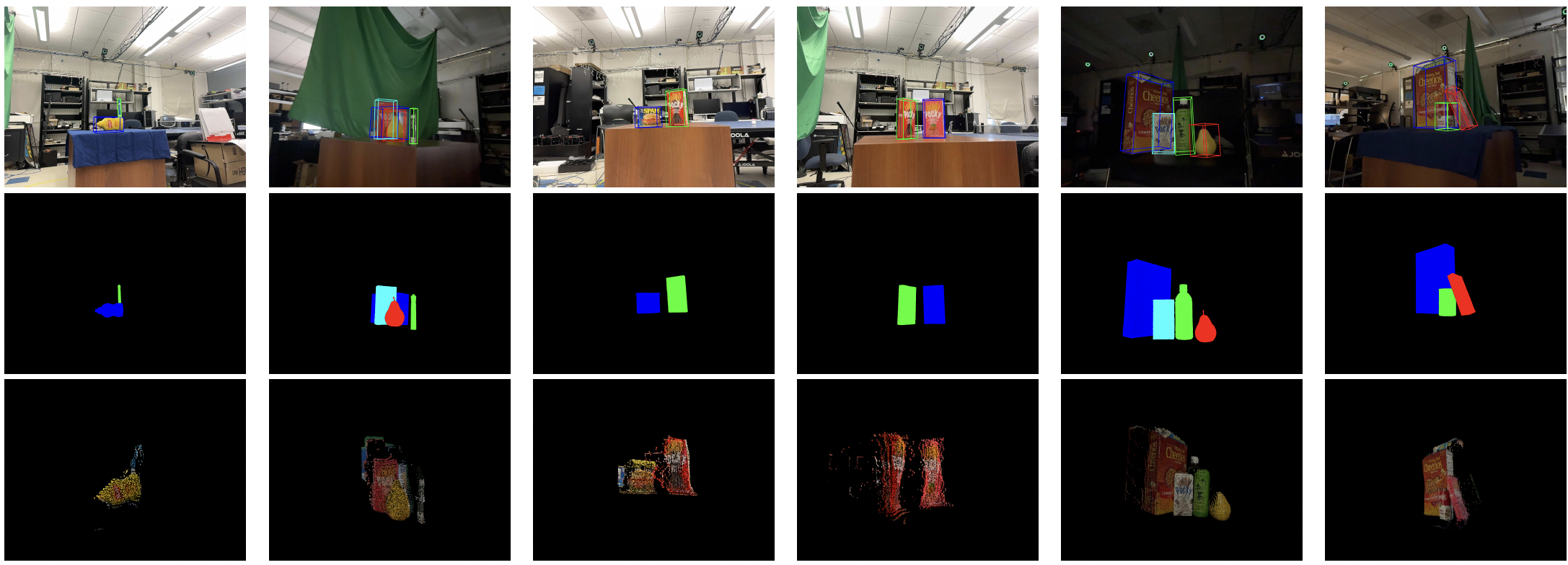
Sample visualizations of our dataset. First row: Annotations for 3D bounding boxes. Second row: Corresponding semantic segmentation labels. Third row: Zoomed-in LiDAR depth visualizations.
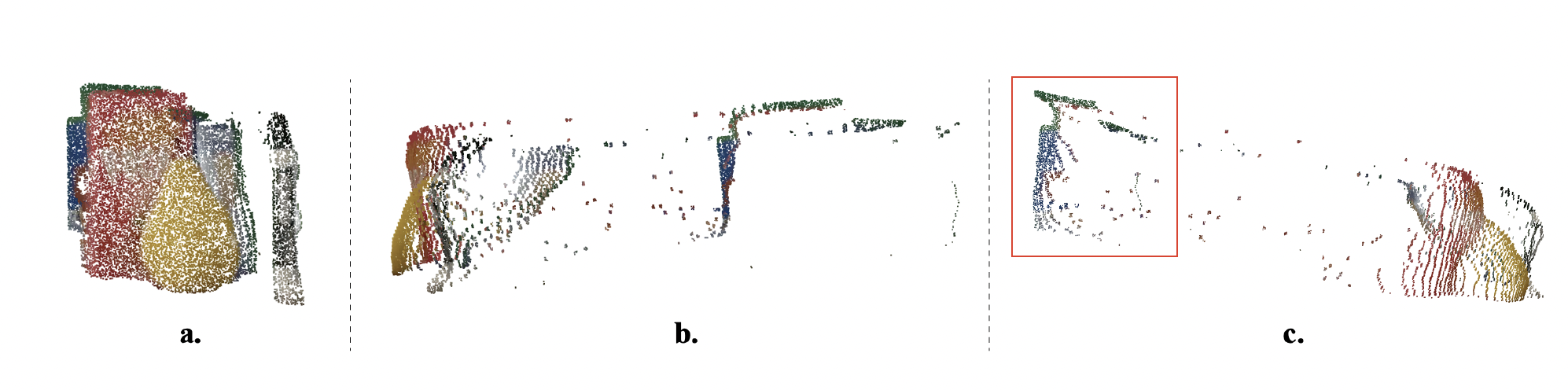
Visualization of an iPhone LiDAR depth scene that shows distortion and long-tail non-Gaussian noise (highlighted inside the red box). (a) Front view. (b) Left view. (c) Right view.

Features and statistics of different datasets.
DTTDNet
We propose a new transformer-based 6DoF pose estimator with depth-robust designs on modality fusion and training strategies, called DTTDNet. We introduce two modules, Chamfer Distance Loss (CDL) and Geometric Feature Filtering (GFF), that enable the point-cloud encoder in DTTDNet to handle noisy and low-resolution LiDAR data robustly.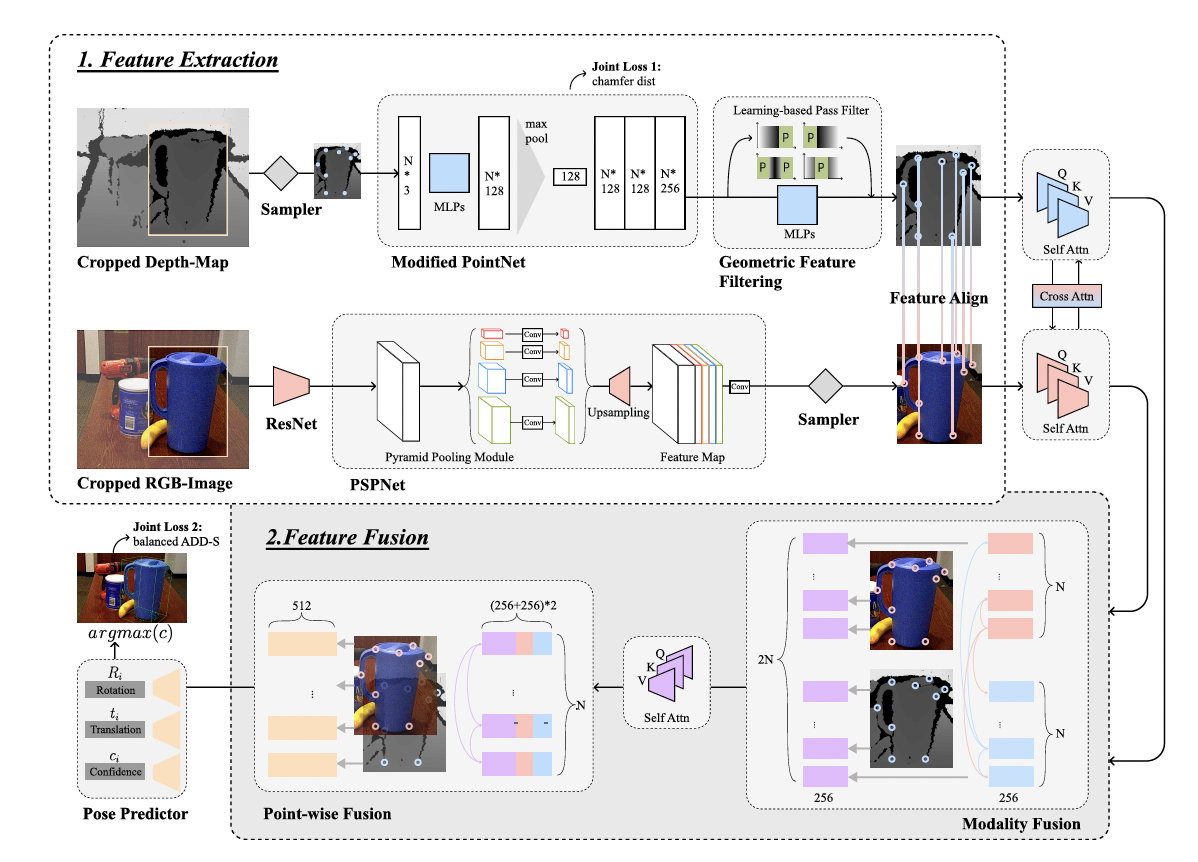
Experiments Results
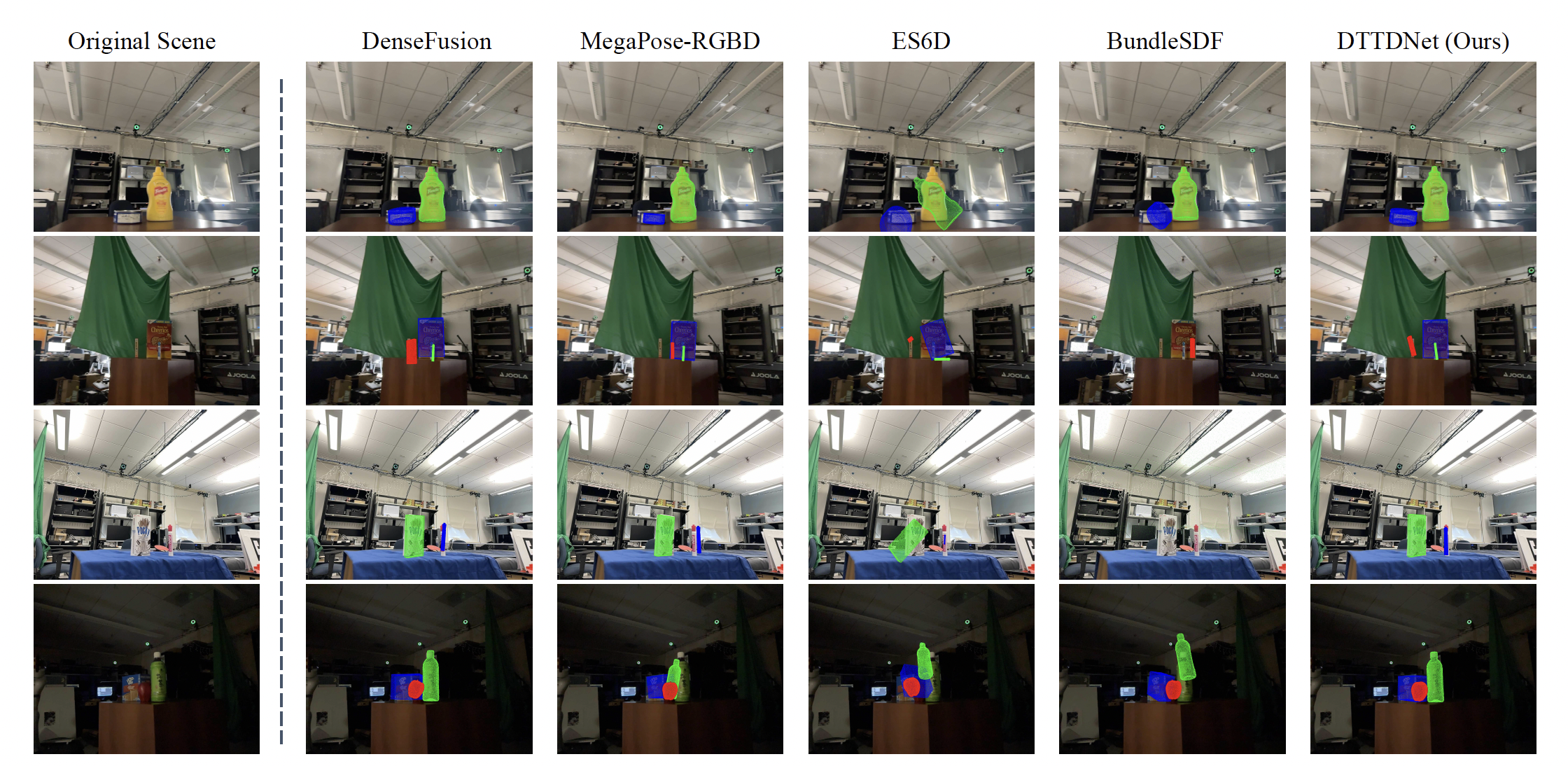
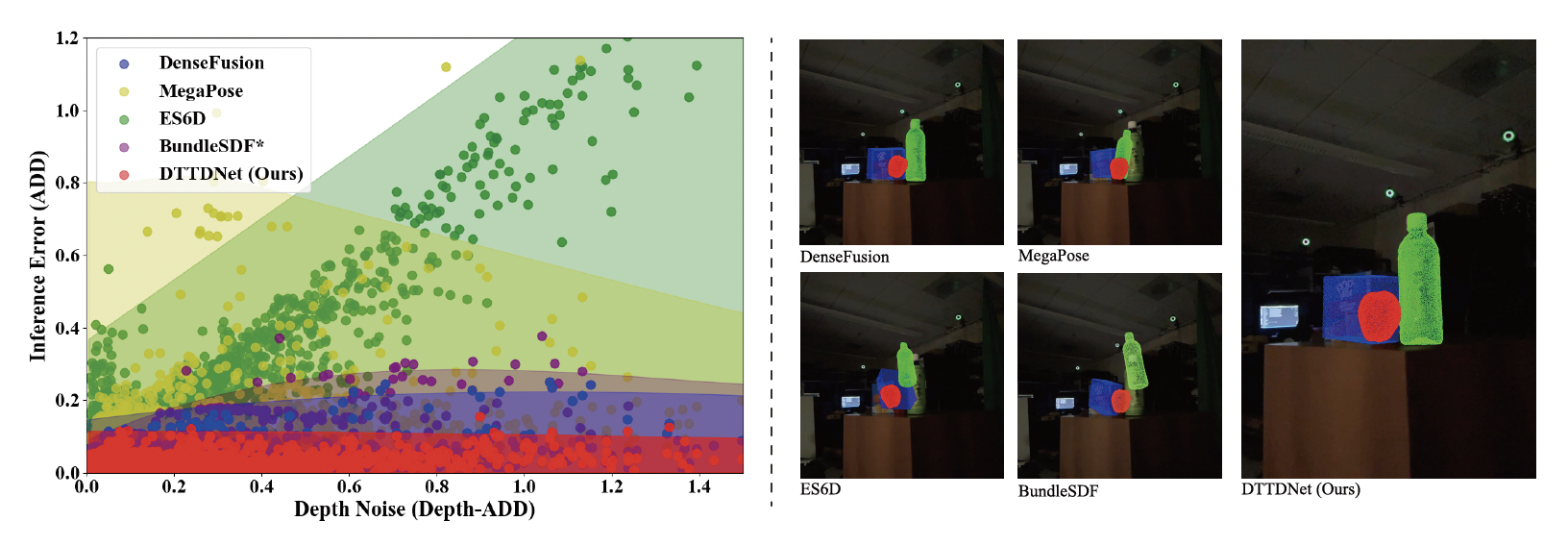
Qualitative evaluation of different methods. To further validate our approach, we provide visual evidence of our model's effectiveness in challenging occlusion scenarios and varying lighting conditions, where other models' predictions fail but ours remain reliable.
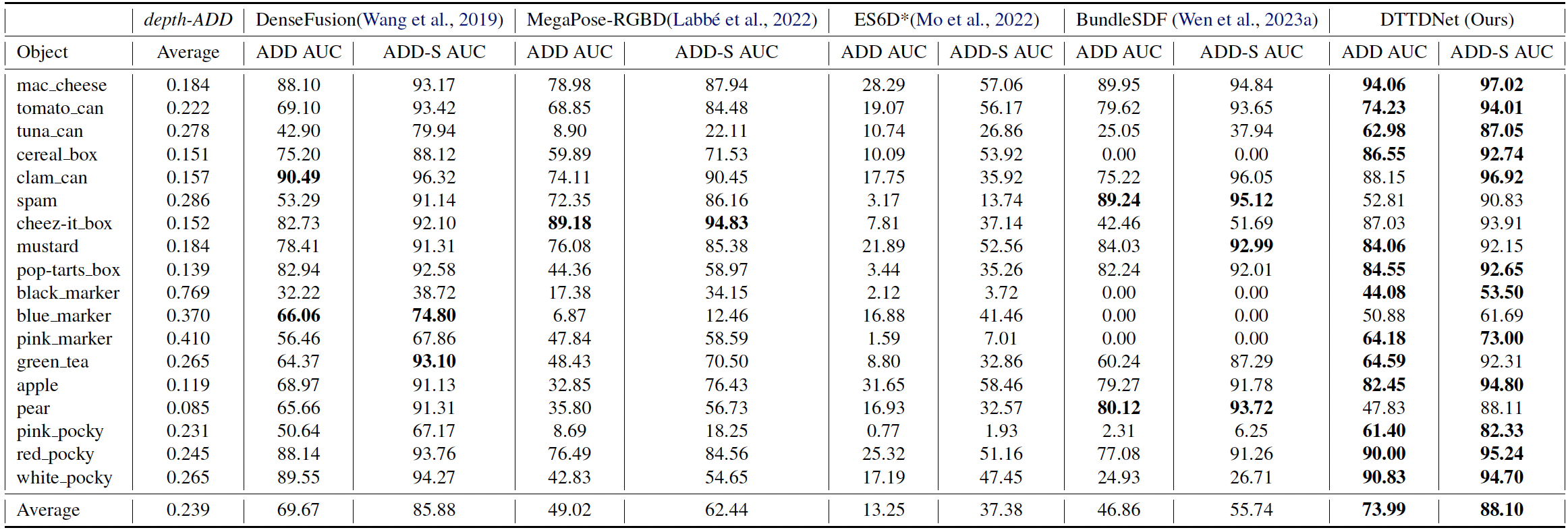
Comparison with diverse 6DoF pose estimation baselines on DTTD-Mobile dataset. We showcase AUC results of ADD-S and ADD on all 18 objects, higher is better. Based on considered 4 baselines, our model significantly improves the accuracy on most objects. Note that the left-most column indicates the per-object depth-ADD error.
Poster
BibTeX
@inproceedings{huang2025robust,
title={Robust 6DoF Pose Estimation Against Depth Noise and a Comprehensive Evaluation on a Mobile Dataset},
author={Huang, Zixun and Yao, Keling and Zhao, Zhihao and Pan, Chuanyu and Yang, Allen},
booktitle={Proceedings of the Computer Vision and Pattern Recognition Conference},
pages={1848--1857},
year={2025}
}